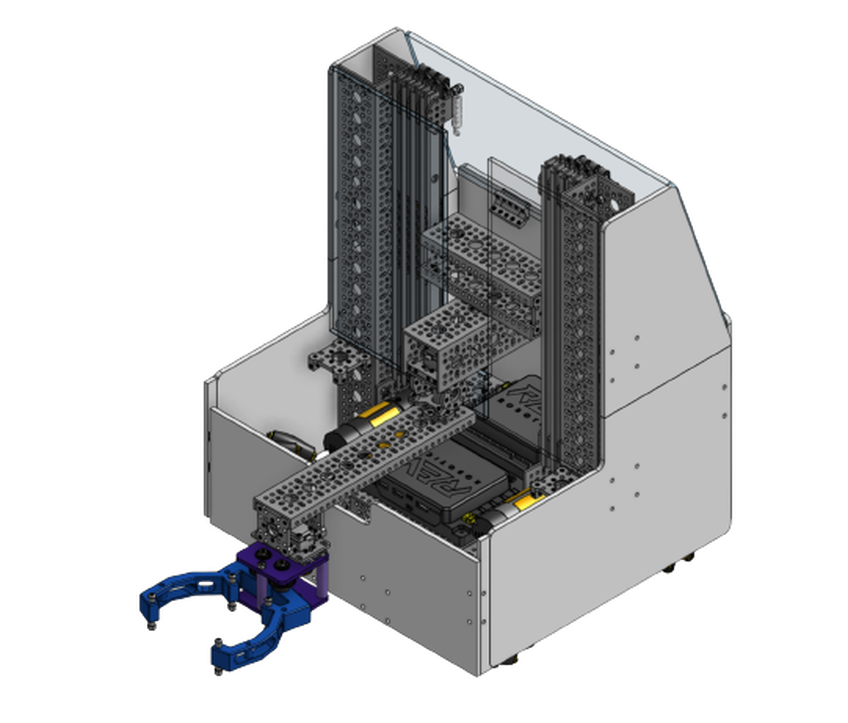
The Snowplower!! Meet our robot, The Snowplower. The Snowplower has 3 subsystems: a drivetrain, an intake, and an output.
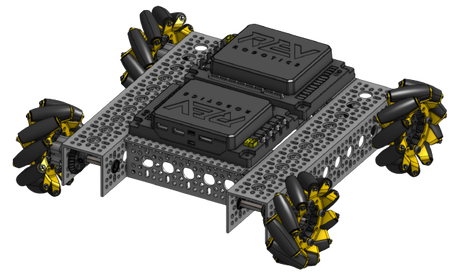
Drivetrain: Our compact drivetrain employs a 10-hole crossbar for length and a 5-hole crossbar for width, ensuring efficiency and easy maneuverability in tight junction spaces. Motors are strategically aligned with the base channel for optimal weight distribution, ample room for electronics on top, and convenient attachment of linear slides.
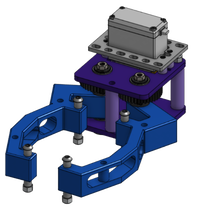
Intake: Our efficient and lightweight claw system employs an innovative design with a servo-driven three-gear train for precise gripping. Utilizing four sets of rubber bands and standoffs, the claws can securely mold around cones while staying compact and lightweight. They can open up to 8.5 inches wide, ensuring easy cone pickup without impeding the linear slide speed.
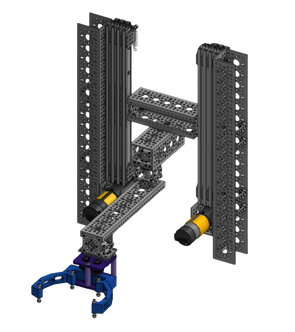
Output: Our robot features two slides, including an inverted four-stage linear slide, powered via a y-harness. Positioned at the center, they deposit cones at various heights. The claw, mounted on a 180-degree rotating servo arm, facilitates easy cone deposition into the junction. Utilizing a high-speed motor at 1,150 RPM, our slides cycle 16 cones efficiently in a game.
Why did we named our robot “The SnowPlower:” We named our robot the SnowPlower because we believe our robot holds the stable and strong qualities of a snowplower. Just as the snowplower is an excellent mechanism for battling the snow, our robot is a solid and powerful alliance partner to have on the field. During this wintery season, we hope to plow through the competition, and just as the snowplower creates a path through lots of snow, we hope to create a path of STEM and engineering for the future!