
Nikola!!
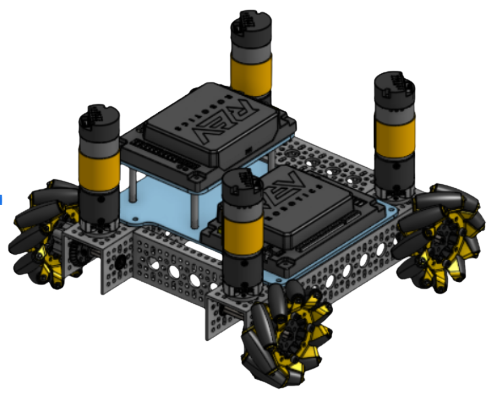
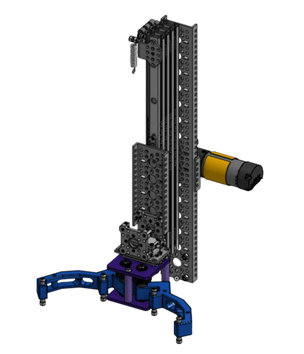
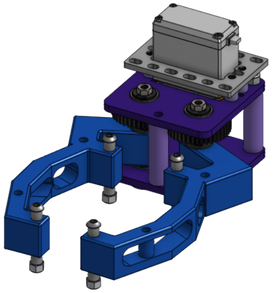
Meet Nikola!! Nikola has 3 subsystems: a drivetrain, an output, and a claw.
|
Drivetrain:
|
|
|
Drivetrain:
|
